We have all heard about the record-breaking ice mass balance and cold temperature reading of -33°C recently set in Greenland — the Arctic island that is supposedly the canary in the climate coal mine.
It turns out that things up there are colder than we may be led to believe and that the alleged warming there is fiction.
Hat-tip: Gerti
Struggling to explain
The Swiss online Baseler Zeitung (BAZ) here reports: “In Greenland July this year has been the coldest ever. That has left climate catastrophists struggling to explain it.”
Citing the Danish Meteorological Institute, the BAZ comments that the -33°C reading earlier this month was “the coldest July temperature ever recorded in the northern hemisphere“, smashing the previous record of 30.7°C.
Expanding ice mass, media ignore
The BAZ adds that also the “ice cover has grown strongly over almost all of Greenland“.
But this has been ignored, as the Switzerland-based daily also bravely writes that “most journalists and media leaders are active or passive members of the green-socialist Climate Church and the new religion of the post-Christian western world” and acknowledge only things that fit their world narrative. This likely explains why there’s been no word about the record cold in Greenland. Why? The BAZ comments:
It casts the central prophesy of a continuous and ultimately lethal global warming, for which we are ourselves to blame, into question.”
Greenland has been cooling
Recently NTZ reported here that Greenland in fact has been cooling over the past decade, as three recent studies alarmingly show us. According to one published in May of this year by a team of researchers led by Takuro Kobashi of the University of Bern, mean annual temperatures at the summit of Greenland have been showing “a slightly decreasing trend in accordance with northern North Atlantic-wide cooling“. See chart below.
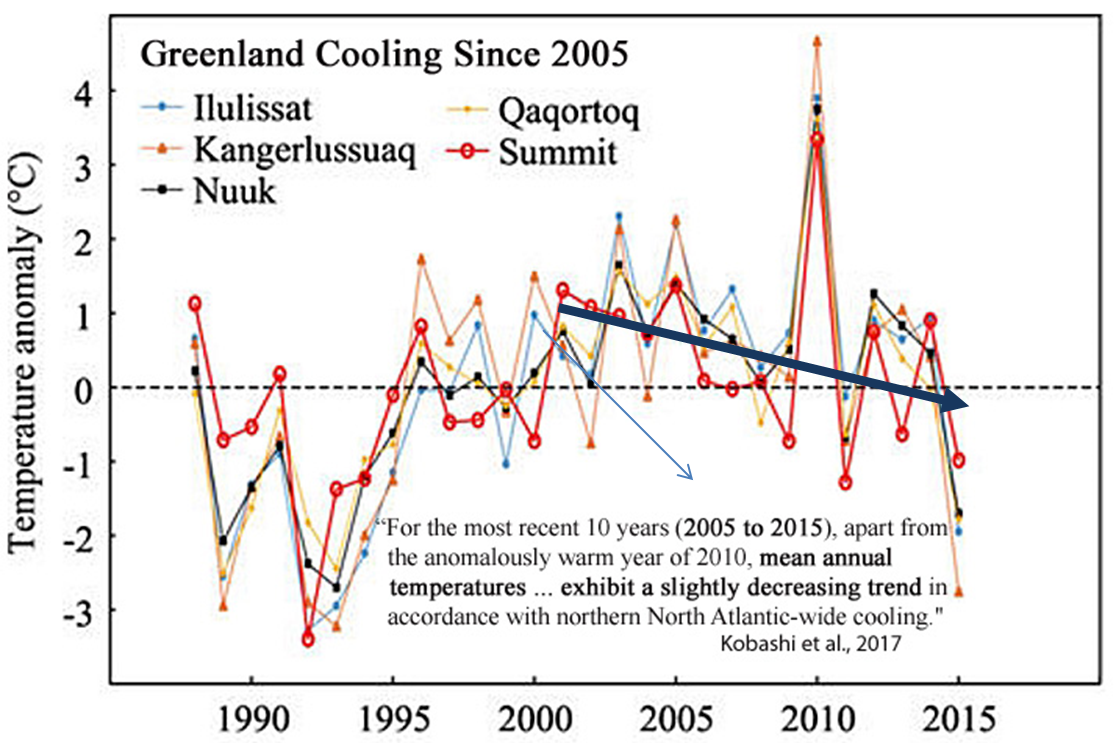
Greenland’s temperatures headed in the wrong direction, defying climate model projections. Underlying chart source: Kobashi et al., 2017.
Warm optimum near an end?
The team by Kobashi also show that the Greenland Summit temperature have not risen in 90 years, and that Greenland was far warmer earlier in the Holocene:
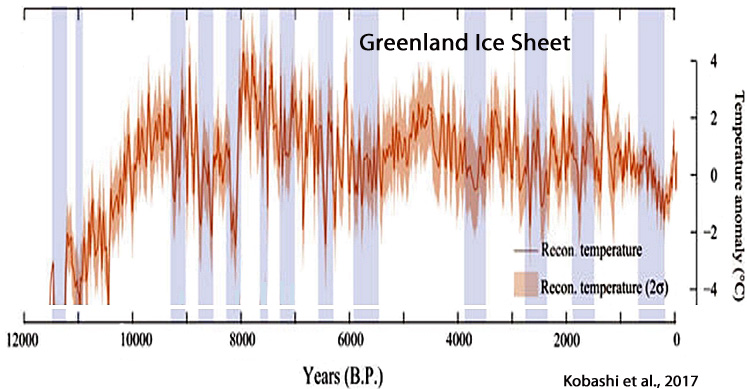
Greenland temperatures were much warmer over past 10,000 years than they are today.
One has to wonder if the current optimum may be nearing an end. History shows that the earth’s surface temperature is in fact highly unstable and that most optimums don’t last much beyond 10,000 years. We need to ask ourselves what could be done to avert the catastrophe that a new ice age would bring with it. The overall trend does not bode well.

And Greenland Ice was ALREADY pretty much at its peak area in over 8000 years !!!
https://s19.postimg.org/ceo16fi7n/Greenland-Ice-Sheet-Briner.jpg
Only time it was slightly higher was during the Little Ice Age, the coldest period in 10,000 years.
You say “The overall trend does not bode well”. I would agree wholeheartedly.
According to ice core records, the last millennium 1000AD – 2000AD has been the coldest millennium of our current Holocene interglacial.
It seems that, driven by the need to continually support the Catastrophic Anthropogenic Global Warming thesis / religion climate scientists and climate alarmists examine the temperature record at too fine a scale, weather event by weather event, month by month, year by year.
Our current, warm, congenial Holocene interglacial has been the enabler of mankind’s civilisation for the last 10,000 years, spanning from mankind’s earliest farming to recent technology.
Viewing the Holocene interglacial is much more fruitful, on a century by century and on a millennial perspective.
Each of the notable high points in the Holocene temperature record, (Holocene Climate Optimum – Minoan – Roman – Medieval – Modern), have been progressively colder than the previous high point.
The ice core record from Greenland for its first 7-8000 years, the early Holocene, shows, virtually flat temperatures, an average drop of only ~0.007 °C per millennium, including its high point known as the “climate optimum”.
But the more recent Holocene, since a “tipping point” at around 1000BC, 3000 years ago, has seen temperature fall at about 20 times that earlier rate at about 0.14 °C per millennium .
The Holocene interglacial is already 10 – 11,000 years old and judging from the length of previous interglacial periods, the Holocene epoch should be drawing to its close: in this century, the next century or this millennium.
Nonetheless, the slight beneficial warming at the end of the 20th century to a Modern high point has been transmuted by Climate alarmists into the “Great Man-made Global Warming Scare”.
The recent warming since the end of the Little Ice Age has been wholly beneficial when compared to the devastating impacts arising from the relatively minor cooling of the Little Ice Age, which include:
• decolonisation of Greenland
• Black death
• French revolution promoted by crop failures and famine
• the failures of the Inca and Angkor Wat civilisations
• etc., etc.
As global temperatures after a short spurt at the end of the last century, have already been showing stagnation or cooling over the last nineteen years or more, the world should now fear the real and detrimental effects of cooling, rather than being hysterical about limited, beneficial or probably now non-existent further warming.
Warmer times are times of success and prosperity for man-kind and for the biosphere. For example during the Roman warm period the climate was warmer and wetter so that the Northern Sahara was the breadbasket of the Roman empire.
But the coming end of the present Holocene interglacial will eventually again result in a mile high ice sheet over much of the Northern hemisphere.
As the Holocene epoch is already about 11,000 years old, the reversion to a true ice age is becoming overdue.
That reversion to Ice Age conditions will be the real climate catastrophe.
With the present reducing Solar activity, significantly reduced temperatures, at least to the level of another Little Ice Age are predicted quite soon later this century.
Whether the present impending cooling will really lead on to a new glacial ice age or not is still in question.
This point is more fully illustrated here:
https://edmhdotme.wordpress.com/2015/06/01/the-holocene-context-for-anthropogenic-global-warming-2/
One of the main stories on the BBC today
http://www.bbc.co.uk/news/science-environment-40321674
It has been cooling since the Minoan Warm period,which is around 3,250 years ago.
There’s even a name for it, which explains why glaciers are so abundant, and why there is so much sea ice and Greenland ice
NEOGLACIATION.
“Greenland’s temperatures headed in the wrong direction, defying climate model projections.” – Pierre
Nothing a few data “adjustments” can’t fix.
“We need to ask ourselves what could be done to avert the catastrophe that a new ice age would bring with it. The overall trend does not bode well.” – Pierre, climate alarmist.
Pierre predicted global cooling back in 2008 for the year 2020. A change of the anomaly to -2.5°C … no less. The catastrophic event that starts a new ice age needs to happen soon for this to become reality.
I’m curious. Do you think that calling the owner of this blog an “alarmist” because he agrees with a growing volume of solar scientists that a grand solar minimum and the concomitant cooler temperatures is on the way is helping your cause? You whine about being called names and not having your comments show up, and then you turn around and do this?
Global cooling is indeed far more debilitating for the biosphere than global warming. Cooling destroys civilizations. Cooling reduces crop yields. Cooling causes far more deaths. Cooling leads to species extinctions. Cooling leads to less stable weather, more pronounced hurricanes…
http://link.springer.com/article/10.1134%2FS0016793213080227
Deep solar activity minima, sharp climate changes, and their impact on ancient civilizations
It is shown that, over the past ∼10000 years (the Holocene), deep Maunder type solar minima have been accompanied by sharp climate changes. These minima occurred every 2300–2400 years. It has been established experimentally that, at ca 4.0 ka BP, there occurred a global change in the structure of atmospheric circulation, which coincided in time with the discharge of glacial masses from Greenland to North Atlantic and a solar activity minimum. The climate changes that took place at ca 4.0 ka BP [4,000 years before present] and the deep solar activity minimum that occurred at ca 2.5 ka BP [2,500 years before present] affected the development of human society, leading to the degradation and destruction of a number of ancient civilizations.
–
http://www.sciencedaily.com/releases/2015/05/150520193831.htm
Cold weather kills 20 times as many people as hot weather, according to an international study analyzing over 74 million deaths in 384 locations across 13 countries
Isn’t that statement pretty alarmist and isn’t this blog most of the times saying that climate alarmists are bad?
I think it would be very alarming/concerning if temperatures were to decline to Little Ice Age levels.
Scaring the public by saying sea levels will rise by 10 feet by 2065, or that one million species will go extinct by 2050…is bad. Do you disagree and support those pronouncements?
Scaring the public by saying a new ice age is coming … is bad.
Don’t distract.
And if an ice age is coming, and one is due, sounding the alarm is in fact the responsible thing to do. If it’s based on good science, it’s necessary. But when alarmism is based on junk science, as is the case with AGW science, then of course it’s bad and should be dismissed.
“Scaring the public by saying a new ice age is coming ”
Oh dear, you poor, little cry-baby !!!
You get more PATHETIC by the day.
P Gosselin,
you sounded the alarm in 2008 … was that based on good science? Will 2020 be the year the anomaly reached -2.5°C? If there is no sign of cooling in 5-10 years, what do you liked to be called then? A responsible person that cries ice age whenever temperatures decrease a little?
Do you think the “junk scientists” are all alarmists? Are the scientists replying to the New York Magazine article “The Uninhabitable Earth” alarmists? https://climatefeedback.org/evaluation/scientists-explain-what-new-york-magazine-article-on-the-uninhabitable-earth-gets-wrong-david-wallace-wells/
You truly are a [snip].
Just because one loony goes way further than the other loonies think he should have, you think what they reply isn’t Junk science.
REALLY ?????
Nearly every one of the replies dribbles with alarmism and CO2 HATRED….
… the same sort of ASS-umption driven model predictions that have made a nonsense of the whole of climate science.
And yes, the responders are amongst the very worse of the AGW JUNK non-scientists.
The whole article and the associated replies are a load of propaganda rubbish and hogwash.
And I suspect even you are just about bright enough to realise that.
Or maybe not.
Sebastian, what you meant to say is that I can’t successfully dispute the blog post,therefore spend time making foggy comments that doesn’t help anyone.
Pierre made a reasonable comment,
“And if an ice age is coming, and one is due, sounding the alarm is in fact the responsible thing to do. If it’s based on good science, it’s necessary. But when alarmism is based on junk science, as is the case with AGW science, then of course it’s bad and should be dismissed.”
Kenneth, made a comment showing a couple of published science papers and an article about mortality rates from cold weather,that supports what Pierre stated about a cooling world, you come back with silly whining of not sticking to your insane statement,
“Scaring the public by saying a new ice age is coming … is bad.
Don’t distract.”
It is FACT that it is warmists like you,the Media,Ecoloonies and Leftists, who try hard to scare the public with numerous unsupported scaremongering pablums of a run away warming future.
You have nothing to sell here,as you try hard to be stupid,give it up.
“Off to Greenland?”
Pierre, we hope our own Ms Griff didn’t just skim the Basler Zeitung headline and follow the suggestion.
Please warn your house trolls, too.
OT, The Paris AGENDA was a complete con by many of the countries
http://manhattancontrarian.com/blog/2017/7/10/looks-like-global-action-on-climate-change-is-dead
OT… A Billion barrels of oil found in Mexico. !
https://wattsupwiththat.com/2017/07/12/mexico-oil-privatization-pays-off-with-billion-barrel-find/
Hurray, enough oil for 55 days of world consumption (96558 thousand barrels a day in 2016). This will change everything, will it?
The proven reserves were 1706.7 billion barrels at the end of 2016. Enough to last us for 17675 days on constant consumption or 13885 days at the average growth rate of the last 10 years (1.2%). Will proven reserves keep up so these day counts never go down?
Yes.
Peak whatever.. so far not happening, is it seb.
The only thing that is likely to happen is Peak Renewable subsidies.
That day.. renewable die a NATURAL death.
“This will change everything, will it?”
Certainly a major bonus for Mexico…
Wouldn’t you agree, seb.
And they have only just started. 🙂
And from what I hear, the “big oil” boys are now interested in the next round of exploration bids.
This is just the start for Mexico.
‘17675 days’
Gee Seb thats only 48 and a half years. twice the life forecast for wind turbines.
We’ll all be runed said Hanrahan
We’ll all be runed
I simply await ‘peak subsidy’ day!
When Micheal Mann thinks you have gone to far it must have been a doozy of a story.
http://www.philly.com/philly/health/environment/climate-change-doomsday-ny-mag-michael-mann-20170710.html
[…] historic trends and fluctuations and are hardly unprecedented. Greenland just recorded its most frigid July temperature reading in history: -33 C (-27 […]
[…] historic trends and fluctuations and are hardly unprecedented. Greenland just recorded its most frigid July temperature reading in history: -33 C (-27 […]
[…] historic trends and fluctuations and are hardly unprecedented. Greenland just recorded its most frigid July temperature reading in history: -33 C (-27 […]
[…] historic trends and fluctuations and are hardly unprecedented. Greenland just recorded its most frigid July temperature reading in history: -33 C (-27 […]
[…] historic trends and fluctuations and are hardly unprecedented. Greenland just recorded its most frigid July temperature reading in history: -33 C (-27 […]
[…] historic trends and fluctuations and are hardly unprecedented. Greenland just recorded its most frigid July temperature reading in history: -33 C (-27 […]
Ice cover area in Greenland or Antarctica is irrelevant. What’s important is ice mass. The GRACE satellites have been measuring mass changes from orbit for fifteen years. During that time, Greenland lost 280 gigatons of ice per year. Antarctica lost 125 gigatons of ice per year.
Grace measures GRAVITY, not ice mass. Both the Arctic and Antarctic sit above active magma sacks.
It has been shown to be MONUMENTALLY WRONG on several occasion, particularly Antarctica, which has been shown to be GAINING ice mass.
Greenland Ice is actually very near it largest area in some 8000 years.
https://s19.postimg.org/ceo16fi7n/Greenland-Ice-Sheet-Briner.jpg
And even assuming the GRACE ice loss is correct, we get this graph of the Total Greenland Ice Mass since 1900.
https://s19.postimg.org/9iwxep7jn/Greenland_Ice_Mass.png
Notice anything ???
Andy, keep in mind what’s going on in situations like this – the propagandists realize that even their own (highly-dubious) numbers are simply neither large nor scary. Thus, they have to find various ways of “restating” the numbers so as to make things sound much more scary. A good example is that infamous comedy gold associated with solar insolation being cast in units of “Hiroshima bombs.”
Run some hack numbers, and you find that it’s the same case here.
According to the wikipedia entry, the total area of the Greenland ice sheet is 1,710,000 square kilometers (1.71*10^12 square meters), while the thickness ranges from 2000 to 3000 meters. Using the middle of the last range (2500 meters) for the rough calculation leads to a total Greenland ice sheet volume of 4.28*10^15 cubic meters.
What of the density of glacial ice? There’s actually a delightful little discussion here:
http://www.iceandclimate.nbi.ku.dk/research/flowofice/densification/
Under pressure from above, the fallen snow densifies into ice – and interestingly, the density asymptotically approaches a final value of 917 kg/m3 by a depth of only 100 meters. That of course makes sense, since even maximally-compacted glacier ice is less dense than water – as evidenced by all glacial ice floating in water whenever that happens.
Using that figure, the total mass of the Greenland ice sheet is 3.92*10^18 kg or 3.92*10^15 metric tons.
So what then of that scary-sounding bleat that “Greenland is losing 280 gigatons of ice sheet mass per year!!!!!”? Well, as a percentage of the total ice mass, 280 GT represents *0.007%*. In other words, it’s nothing to the point of probably being unmeasurable statistical noise. Or, if you prefer, if the Greenland ice sheet were to lose mass at a rate of 280 GT per year, it would take 14,000 years (!) for it to disappear completely.
For completeness, one of the charts you provided has a total Greenland ice sheet mass of 2.4*10^15 GT – less than the hack calculation I did above, but overall pretty close (way closer than an order of magnitude). Using that number, 280 GT is 0.01% of the total mass of the Greenland ice sheet. At that rate of annual mass loss, it would still take more than 8500 years for the Greenland ice sheet to disappear completely.
Apparently, “gigatons” are the new “Hiroshima bombs.”
[…] Most of what you’ve read about Greenland is wrong […]
[…] Most of what you’ve read about Greenland is wrong […]
[…] total atmospheric carbon dioxide levels continue to rise. But meanwhile, Greenland just had the coldest July temperature ever recorded in the Northern Hemisphere, and global average temperatures are back to […]
[…] – total atmospheric carbon dioxide levels continue to rise. But meanwhile, Greenland just had the coldest July temperature ever recorded in the Northern Hemisphere, and global average temperatures are back to the 1998-2017 […]
[…] – total atmospheric carbon dioxide levels continue to rise. But meanwhile, Greenland just had the coldest July temperature ever recorded in the Northern Hemisphere, and global average temperatures are back to the 1998-2017 […]
[…] total atmospheric carbon dioxide levels continue to rise. But meanwhile, Greenland just had the coldest July temperature ever recorded in the Northern Hemisphere, and global average temperatures are back to […]
[…] – total atmospheric carbon dioxide levels continue to rise. But meanwhile, Greenland just had the coldest July temperature ever recorded in the Northern Hemisphere, and global average temperatures are back to the 1998-2017 […]
[…] total atmospheric carbon dioxide levels continue to rise. But meanwhile, Greenland just had the coldest July temperature ever recorded in the Northern Hemisphere, and global average temperatures are back to […]